Pic-man
Pic-man is a development board powered by a 16 bit PIC microprocessor.
Features
- 16 MIPS, 32 Mhz, 8K RAM
- 14 IO pins
- 6 Analog IO pins
- 8 IO pins that can be used at 3V or 5V logic
- OLED/LED Screen Output with Library
- Control up to 4 DC motors or 2 stepper motors
- PicKit 3 connector
- Has libraries for various electronic devices
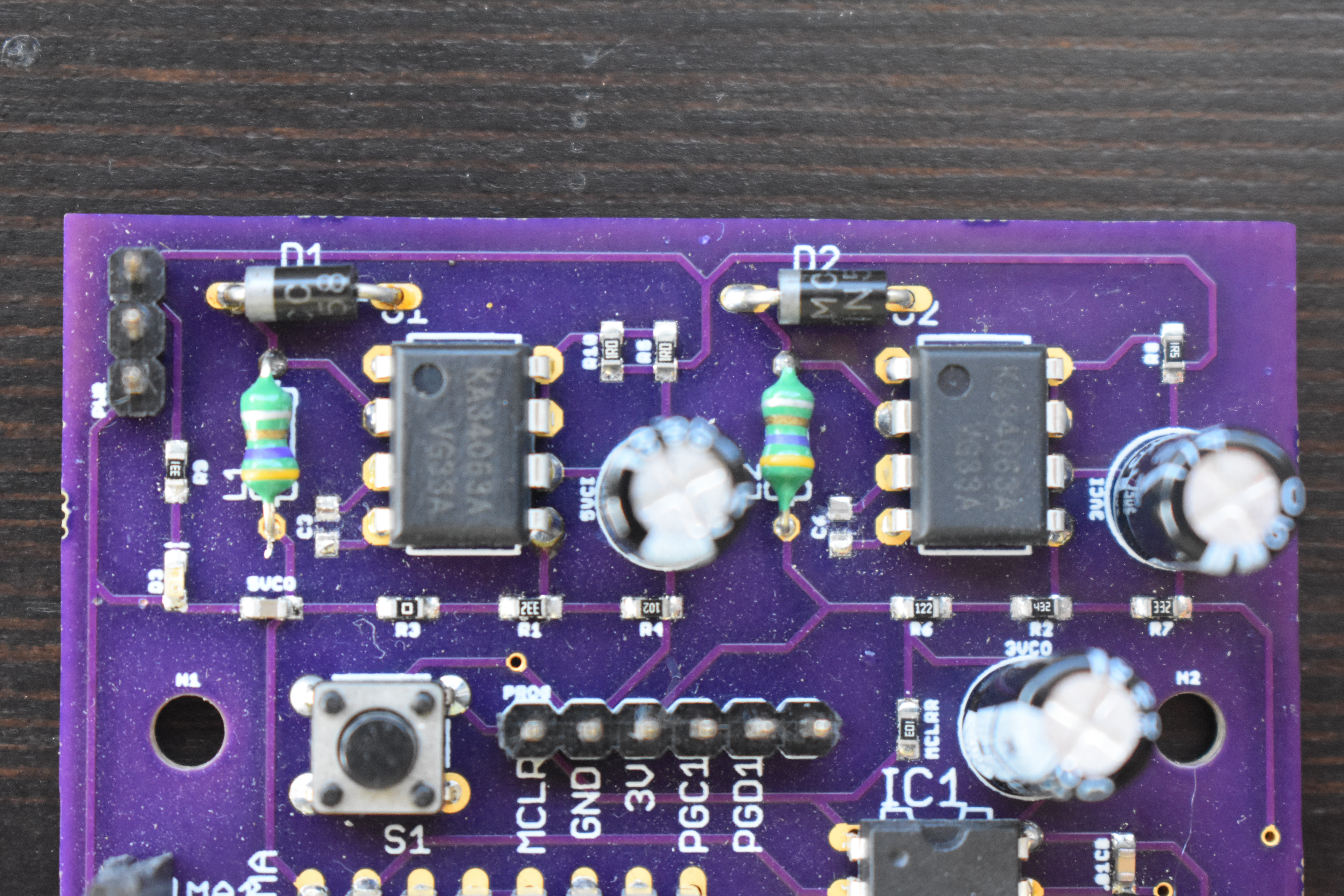
How It's Built
1. Schematics
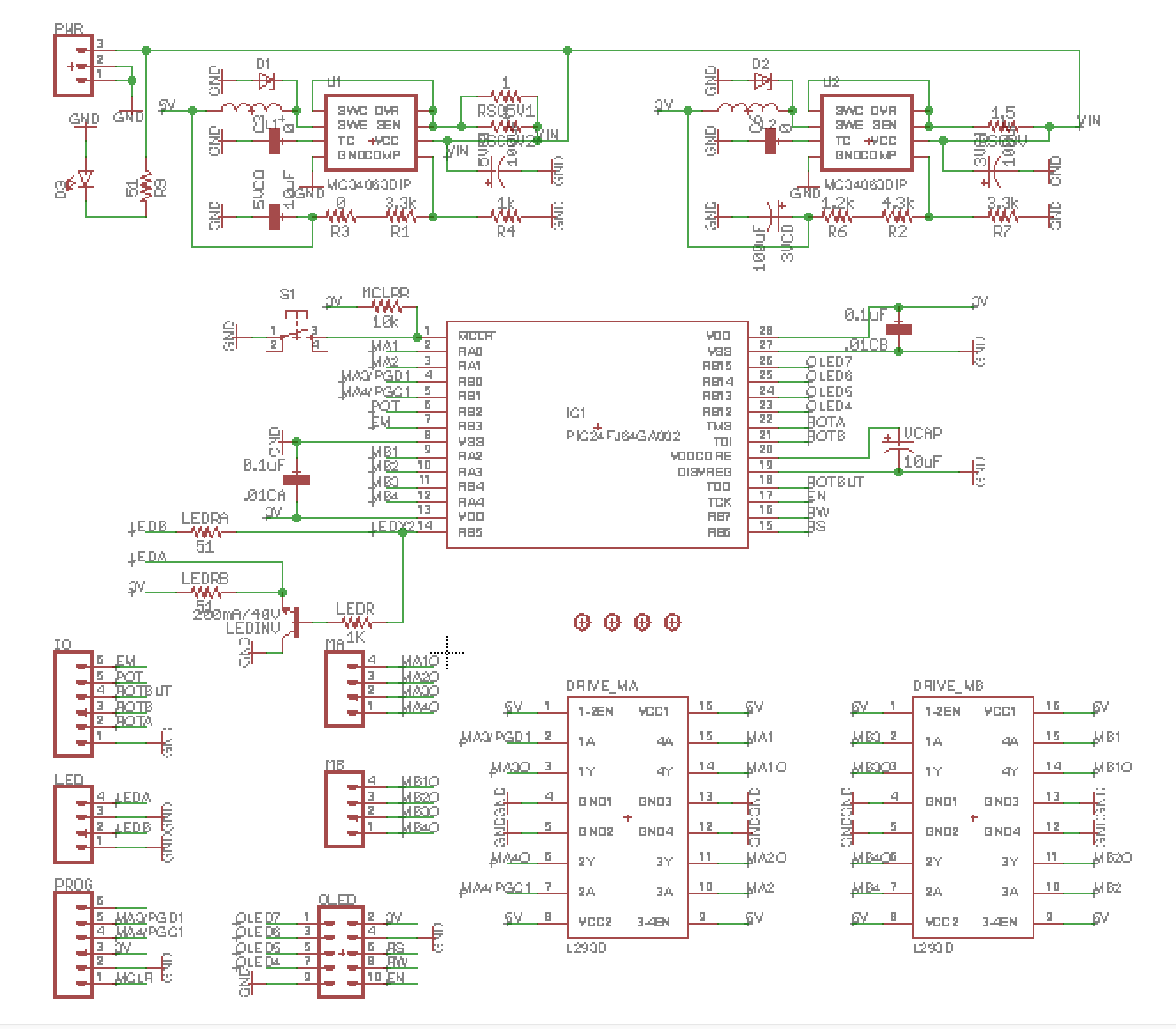
2. Routing
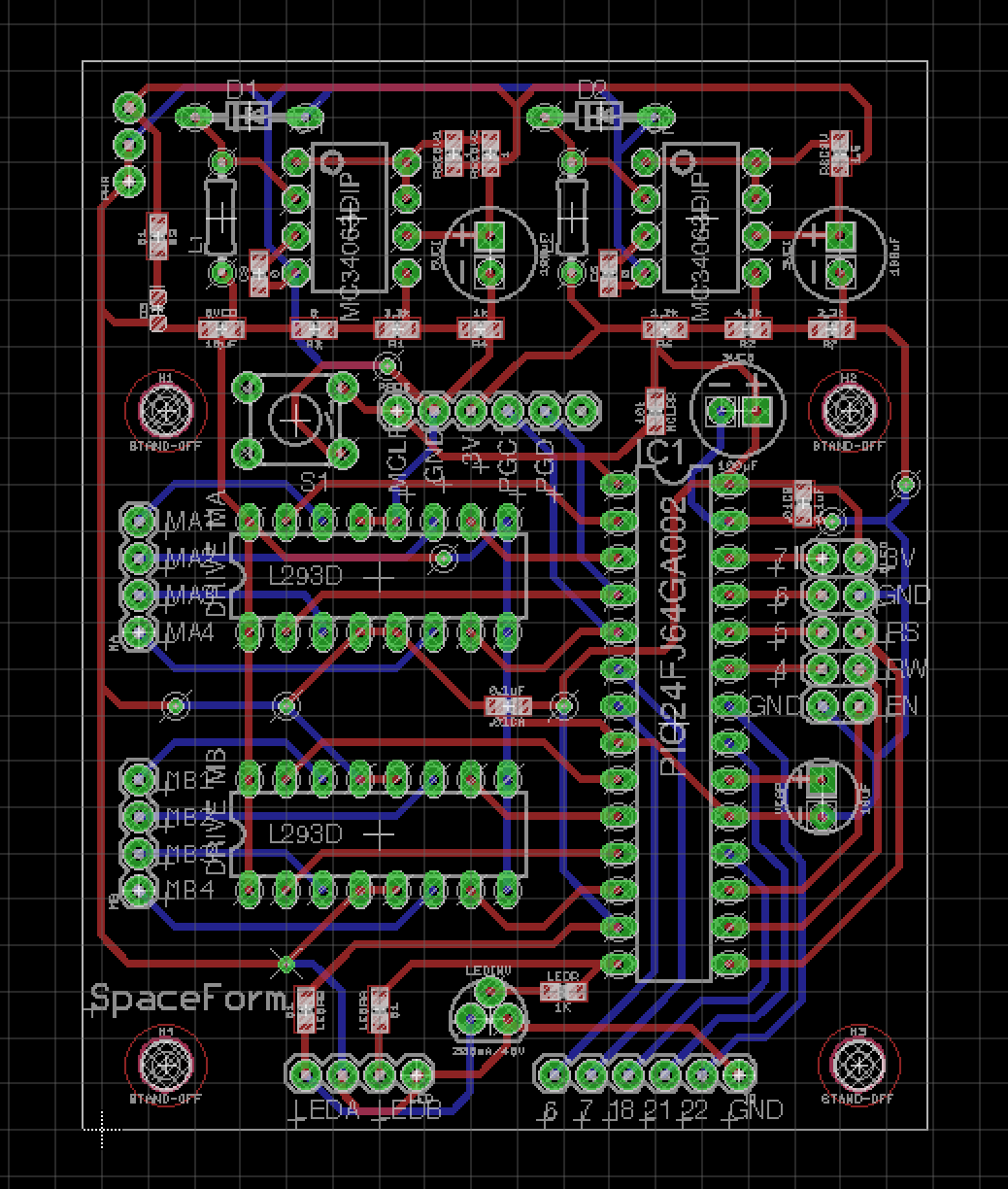
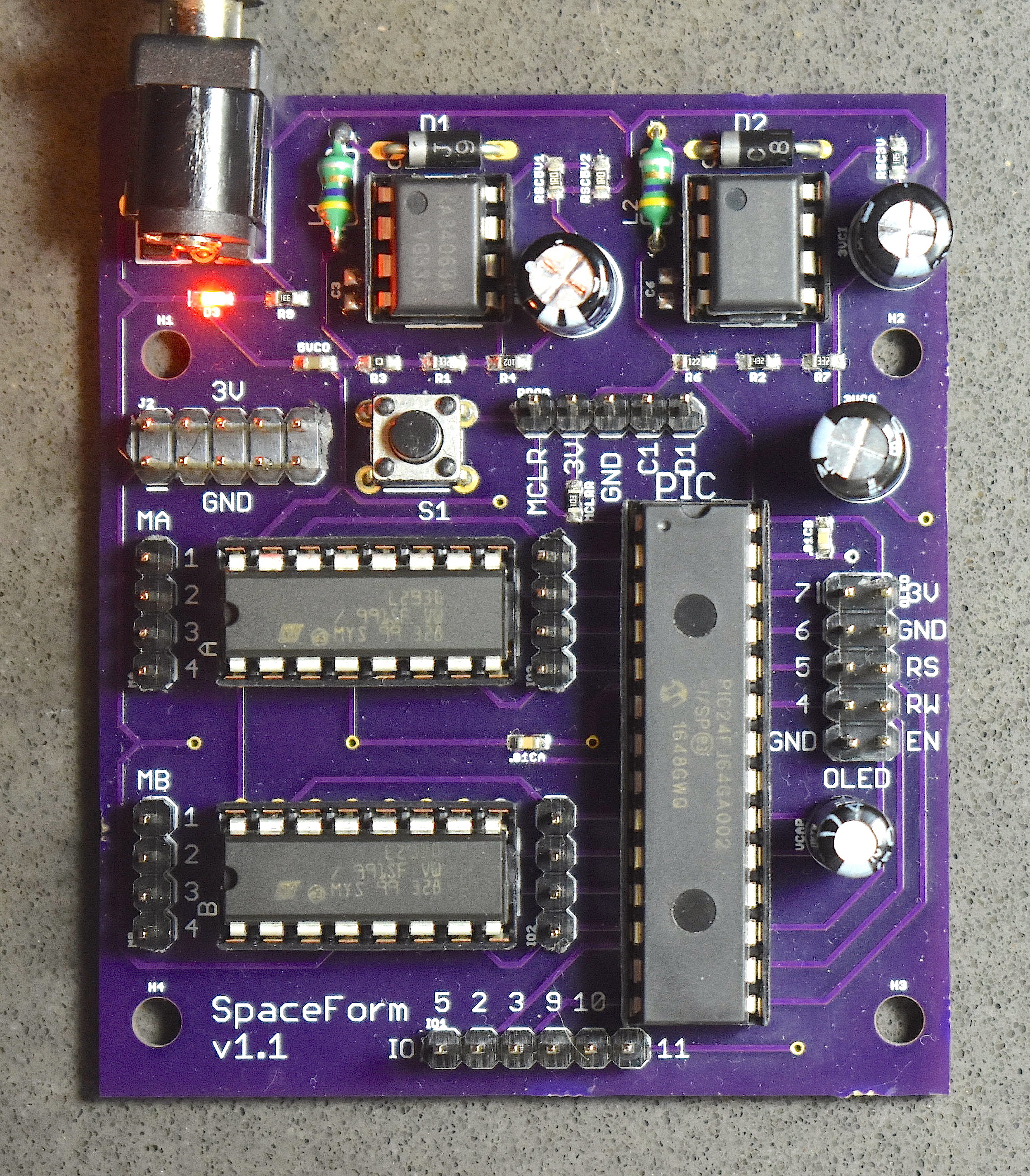
3. Printing
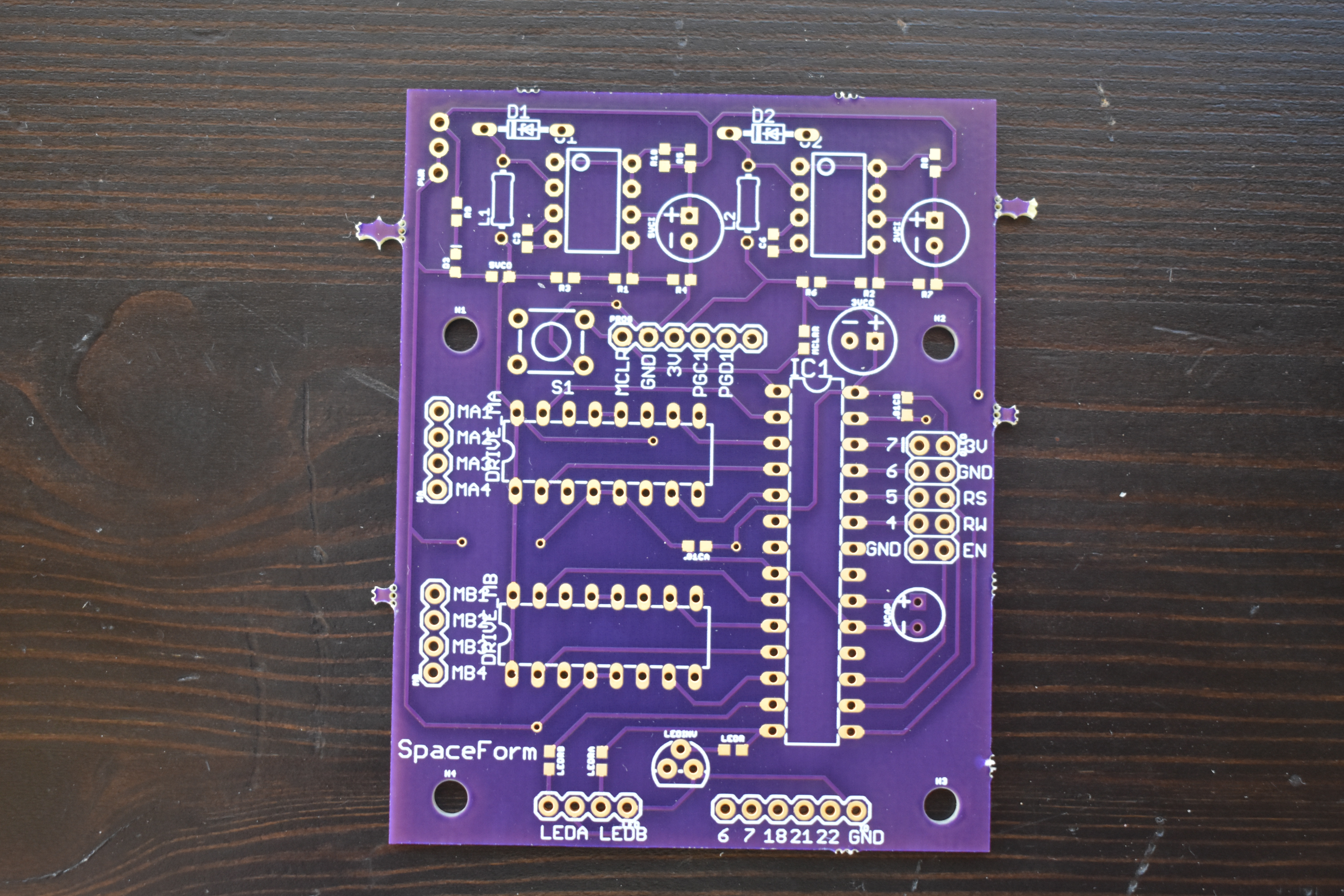
4. Soldering
Libraries
All the libraries can be found on Github. I use MPLabX and the PicKit3 programmer.
OLED/LED Screen
This library can be used to power a 2 row OLED screen. The board comes with a 5x2 connector that can hook up to common screens bought from Adafruit or Sparkfun.
Functions
void init_oled ( void )
- Sets IO pins and runs through screen start routine.void set_cursor ( int col, int row ) - Set the cursor to the specified row and column.
void print ( char* text )
- Prints a string to the screen.void clear ( void ) - Clears the screen.
void home ( void ) - Set the cursor to the first column on the first row.
Stepper Motors
This library can be used to control stepper motors in full or half stepping modes.
Functions
void init_stepper (void )
void move_deg ( float degrees, float degree )
void set_rpm ( float rpm )
void stop (void )
Rotary Encoder
This library can be used to handle input from a stadard rotary encoder with a button. It has 3 digital inputs, 2 for the rotary encoder and 1 for the button.
Functions
void init_rot ( void )
unsigned char get_rot_value ( void )
unsigned char get_rot_but_value ( void )
Analog Input
This library can be used to handle analog inputs like a potentiometer or something.
Functions
void init_ad ( void )
int get_ad_value ( void )
unsigned char get_rot_but_value ( void )
Pulse Width Modulation
This library uses the output capture feature of the PIC and can be used to output a PWM signal on a IO pin.
Functions
void update_pwm ( int duty_index )
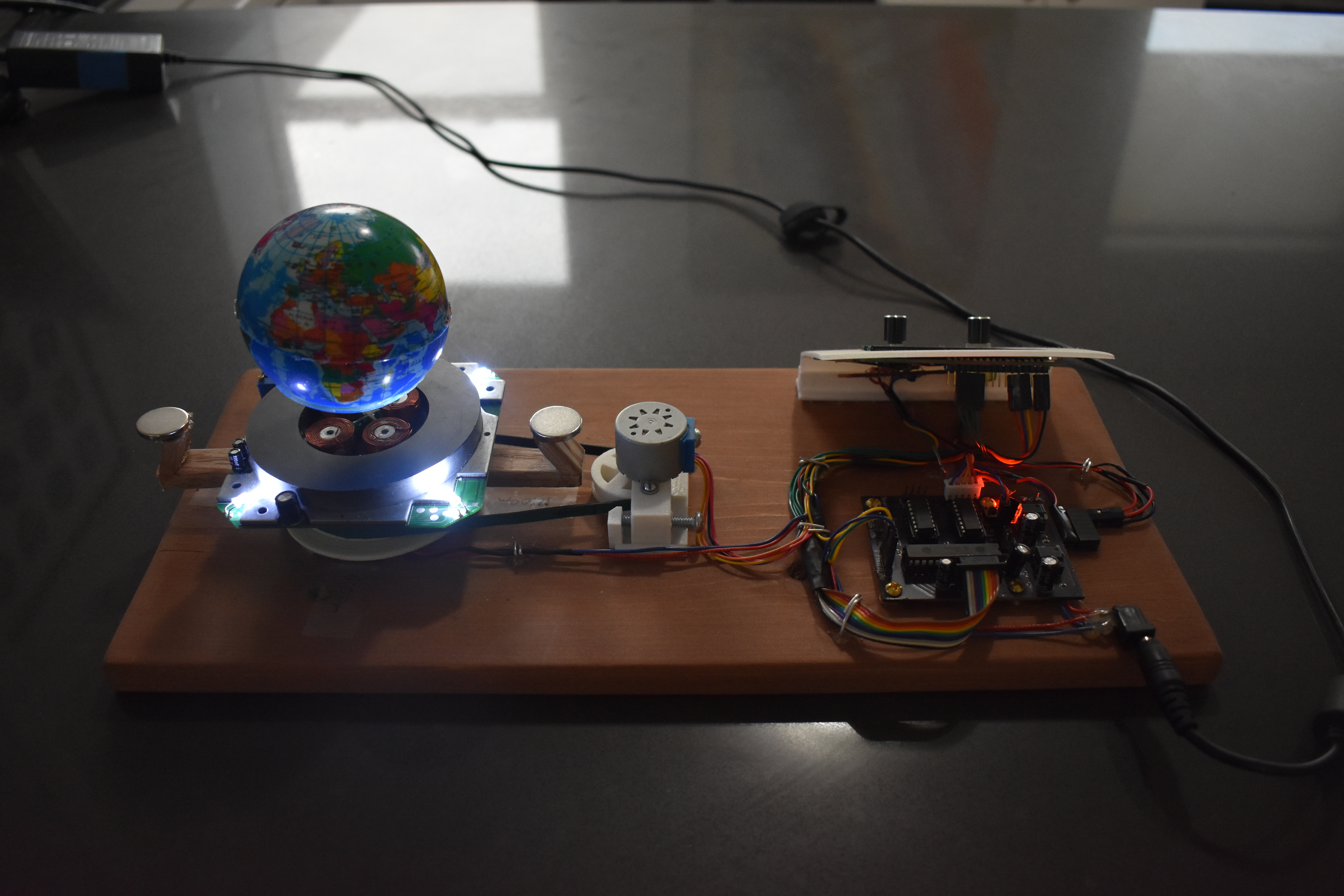
All libraries working in unison.